Check out google scholar page for a complete list.
Theses Conference Publications
Workshop Publications Journal Publications Technical Reports

Planning and Execution using Inaccurate Models with Provable Guarantees on Task Completeness
Anirudh Vemula
Robotics Institute, CMU 2022 (pdf, defense video, slides)
PhD in Robotics Thesis
Safe and Efficient Navigation in Dynamic Environments
Anirudh Vemula
Robotics Institute, CMU 2017 (pdf, slides)
Masters in Robotics Thesis
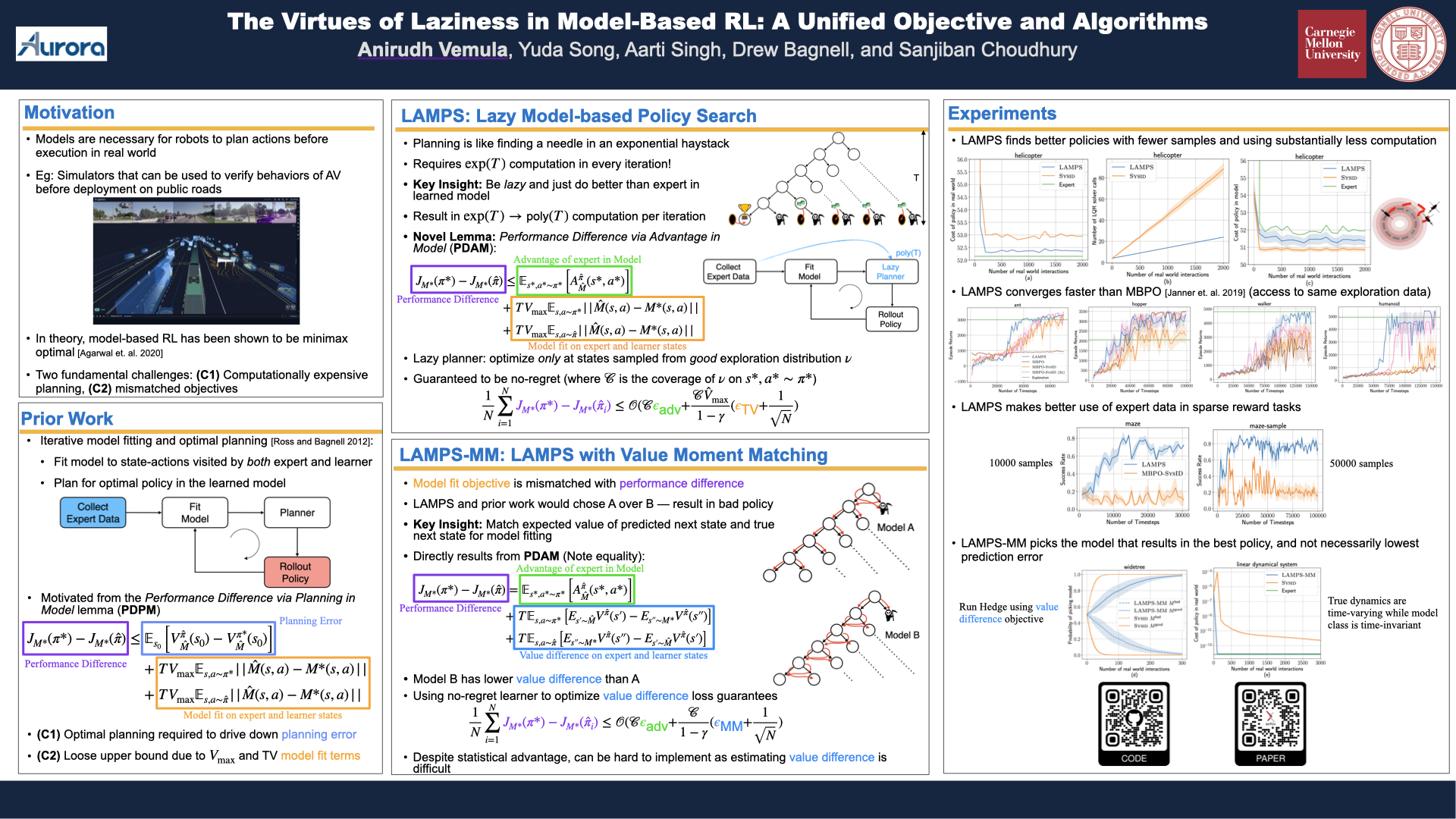
The Virtues of Laziness in Model-based RL: A Unified Objective and Algorithms
Anirudh Vemula, Yuda Song, Aarti Singh, J. Andrew Bagnell, Sanjiban Choudhury
ICML 2023 (arxiv, code, bibtex, poster, talk)
Acceptance rate: 27%
On the Effectiveness of Iterative Learning Control
Anirudh Vemula, Wen Sun, Maxim Likhachev, J. Andrew Bagnell
L4DC 2022 (arxiv, code, bibtex)
Acceptance rate: 51%
Improved Soft Duplicate Detection in Search-Based Motion Planning
Nader Maray, Anirudh Vemula, Maxim Likhachev
ICRA 2022 (arxiv, 3D code, 5D code, bibtex)
Acceptance rate: 43%
CMAX++: Leveraging Experience in Planning and Execution using Inaccurate Models
Anirudh Vemula, J. Andrew Bagnell, Maxim Likhachev
AAAI 2021 (blog, arxiv, code, poster, bibtex)
Acceptance rate: 21%
TRON: A Fast Solver for Trajectory Optimization with Non-Smooth Cost Functions
Anirudh Vemula, J. Andrew Bagnell
CDC 2020 (arxiv, presentation, code, bibtex, slides)
Acceptance rate: 53%
Planning and Execution using Inaccurate Models with Provable Guarantees
Anirudh Vemula, Yash Oza, J. Andrew Bagnell, Maxim Likhachev
RSS 2020 (blog, arxiv, presentation, code, video, bibtex)
Acceptance rate: 32%
Planning, Learning and Reasoning Framework for Robot Truck Unloading
Fahad Islam*, Anirudh Vemula*, Sung-Kyun Kim, Andrew Dornbush, Oren Salzman, Maxim Likhachev
* Equal Contribution
ICRA 2020 (arxiv, presentation, video, bibtex)
Acceptance rate: 42%
Provably Efficient Imitation Learning from Observation Alone
Wen Sun, Anirudh Vemula, Byron Boots, J. Andrew Bagnell
ICML 2019 (Oral) (arxiv, code, bibtex)
Acceptance rate: 22% (Oral 5%)
Contrasting Exploration in Parameter and Action Space: A Zeroth Order Optimization Perspective
Anirudh Vemula, Wen Sun, J. Andrew Bagnell
AISTATS 2019 (arxiv, code, bibtex)
Acceptance rate: 32%
Social Attention: Modeling Attention in Human Crowds
Anirudh Vemula, Katharina Muelling, Jean Oh
ICRA 2018 (arxiv, bibtex)
Best Paper Award in Cognitive Robotics
Acceptance rate: 40%
Modeling Cooperative Navigation in Dense Human Crowds
Anirudh Vemula, Katharina Muelling, Jean Oh
ICRA 2017 (arxiv, bibtex)
Acceptance rate: 41%
Path Planning in Dynamic Environments with Adaptive Dimensionality
Anirudh Vemula, Katharina Muelling, Jean Oh
SoCS 2016 (arxiv, code, bibtex)
Acceptance rate: 38%
Contrasting Exploration in Parameter and Action Space: A Zeroth Order Optimization Perspective
Anirudh Vemula, Wen Sun, J. Andrew Bagnell
Deep Reinforcement Learning Workshop
NeurIPS 2018 (pdf, code)
Exploration in Action Space
Anirudh Vemula, Wen Sun, J. Andrew Bagnell
Learning and Inference in Robotics: Integrating Structure, Priors and Models workshop
RSS 2018 (arxiv, code, bibtex)
Improving Public Transportation through Crowd-Sourcing
Anirudh Vemula, Nikhil Patil, Vivek Paharia, Aneesh Bansal, Megha Chaudhary, Naveen Aggarwal, Divya Bansal, KK Ramakrishnan, Bhaskaran Raman
Intelligent Transportation Systems Workshop
COMSNETS 2015 (pdf, bibtex)
Task-informed Fidelity Management for Speeding up Robotics Simulation
Abhijeet Tallavajhula*, Adrian Schoisengeier*, Sung-Kyun Kim, Anirudh Vemula, Levi Lister, Oren Salzman
(arxiv, bibtex)
Learning Motion Planning Assumptions
Anirudh Vemula, Sanjiban Choudhury, Sebastian Scherer
Technical Report, Robotics Institute, Carnegie Mellon University. 2014 (pdf)
{kind=link}